ロボット工学セミナーのご案内
主 催:一般社団法人 日本ロボット学会
協 賛(予定):計測自動制御学会,精密工学会,電気学会,電子情報通信学会,土木学会,日本機械学会,日本ロボット工業会,農業機械学会,自動化推進協会,バイオメカニズム学会,産業技術連携推進会議,機械・金属連合部会/福祉技術部会,機械技術協会,応用物理学会,人工知能学会,日本神経回路学会,システム制御情報学会,情報処理学会,日本人間工学会,日本時計学会,日本バーチャルリアリティ学会,日本設計工学会,日本コンピュータ外科学会,日本シミュレーション学会
第71回 ロボット工学セミナー
次世代アクチュエータの技術動向と筋骨格への応用
| 日 時: | 2012年6月29日(金)13:00〜18:00 |
| 会 場: | 中央大学 後楽園キャンパス 6号館7階6701号室(112-8551 東京都文京区春日1-13-27) |
| アクセス: | http://www.chuo-u.ac.jp/chuo-u/campusmap/korakuen_j.html |
| http://www.chuo-u.ac.jp/chuo-u/access/access_korakuen_j.html | |
| 東京メトロ丸ノ内線・南北線 後楽園駅下車, 徒歩5分 都営三田線大江戸線 春日駅下車,徒歩7分 JR総武線 水道橋駅下車,徒歩15分 | |
定 員: |
50名(定員になり次第締め切ります) |
参加費: |
当学会及び協賛学会の正会員/8,400円,会員外/12,600円,学生(会員,非会員を問わず)/4,200円,当学会賛助会員 招待券ご利用/無料,優待券ご利用/4,200円,左記サービス券なし/12,600円
|
口 上: |
アクチュエータ技術は運動制御の基盤であり,産業・交通・医療福祉など様々な領域での発展が望まれています.これまでは回転型のモータやエンジンが主流として利用されてきましたが,近年になり筋骨格などにも応用可能な次世代アクチュエータが次々と開発され,注目を集めています.本セミナーでは様々な事例を通してアクチュエータ開発の技術動向を紹介・解説します.また,アクチュエータを利用するユーザ側からの解説を含め,特に次世代アクチュエータ技術とその筋骨格系への実装を2つの軸として議論を展開することにより,アクチュエータ開発の動向と課題を俯瞰的に把握できるようにすることを目指します. オーガナイザー:辻 俊明(埼玉大学) |
講演内容: |
||
13:00-13:10 |
<開会挨拶・講師紹介> |
|
第1話「次世代アクチュエータの研究開発の動向」 |
||
13:10-14:00 |
東京大学 樋口 俊郎 |
|

|
将来の応用展開を踏まえた各種の次世代アクチュエータの実現と,アクチュエータ技術全体に共通する基盤技術の確立をめざして,科学研究費補助金特定領域研究「ブレイクスルーを生み出す次世代アクチュエータ研究」(研究期間:平成16年〜20年度)が50以上の大学等の研究機関が参画することにより実施された.この特定領域研究の成果の概要の紹介を行うことにより,新しいアクチュエータについての研究開発の動向を述べる.当研究室では,種々の方式の革新的なアクチュエータの開発に取り組んできており,本講演では,圧電アクチュエータ,強力静電モータ,完全非接触アクチュエータ,弾性表面波モータ,マイクロ磁歪アクチュエータなどの紹介も併せて行いたい.  ブレイクスルーを生み出す次世代アクチュエータ研究 |
|
第2話「スパイラルモータのモデルと制御」 |
||
14:00-14:50 |
横浜国立大学 藤本 康孝 |
|

|
ヒューマノイドロボットやパワーアシストシステムへの応用を目指し,小型で力の強いダイレクトドライブリニアアクチュエータ(スパイラルモータ)の開発を行っている.スパイラルモータは,可動子と固定子を螺旋形状とすることで,ボールねじアクチュエータの機能を電磁力により非接触で実現する.可動子と固定子の対向面積が広いため,通常のリニアモータと比較して体積あたりの推力が大きく,また,可動子の磁気浮上制御により機械損が低減できる,という特長を有する.本講演では,スパイラルモータのモデルや制御法について紹介する.また,スパイラルモータの筋骨格型ロボットへの応用について紹介する. 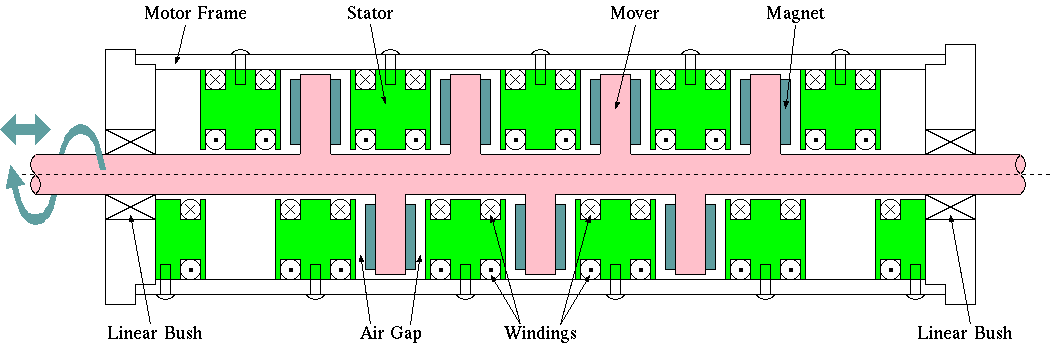 スパイラルモータの構造 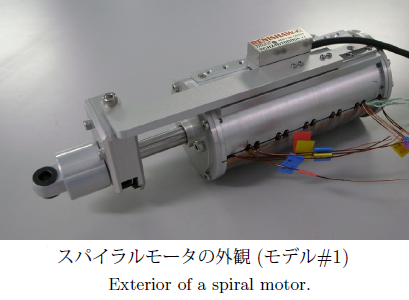 スパイラルモータの写真 |
|
14:50-15:10 |
<休息> |
|
第3話「軸方向繊維強化型空気圧ゴム人工筋肉の開発とその応用」 |
||
15:10-16:00 |
中央大学 中村 太郎 |
|

|
軸方向繊維強化型ゴム人工筋肉は従来のMcKibben型ゴム人工筋肉に比べ収縮率,収縮力が優れた特性を持つ.本講演では本人工筋肉の制御法,拮抗関節 に適用した場合の可変弾性制御手法,および7軸マニピュレータ,ミミズロボット,蠕動運動ポンプへの応用等について述べる.  中村研究室のロボット |
|
第4話「パワーアシストロボット開発におけるアクチュエータの選定と実装」 |
||
16:00-16:50 |
アクティブリンク 藤本 弘道 |
|

|
アクティブリンク株式会社は,2003年の創業以来,装着型や搭乗型のパワーアシストロボットの実用を目指した受託開発事業・製造販売事業を行っている.用途も,医療福祉分野,作業支援分野,教材としてなど,多岐に渡り,用途に応じて,モータや空気圧式ゴム人工筋など様々なアクチュエータを用いたパワーアシスト機器の開発を進めている.そこで,アクチュエータを利用する立場から,どのような視点で選定を進めているか,どのようなアクチュエータが欲しいかなど,試作機開発の現場での経験を元に紹介を行う.  パワーローダーライト"PLL" |
|
16:50-17:00 |
<閉会挨拶> |
|
17:00-18:00 |
<見学会> |
|
閉会後,中央大学中村研究室を見学させていただきます.実際の筋骨格型のロボット等を見ることができます. |
||