第121回 ロボットの作り方 ~ROSを使用した画像処理とマニピュレータ制御
| 開催日 | 2019年11月16日(土)10:00 ~ 17日(日)17:00の2日間(※両日とも参加必須) |
|---|---|
| 開催地 | 中央大学 後楽園キャンパス 2号館 2215・2221号室 製図室(東京都文京区春日1-13-27) |
会場アクセス:
http://www.chuo-u.ac.jp/access/kourakuen/
http://www.chuo-u.ac.jp/campusmap/kourakuen/
最寄り駅:「後楽園駅」(東京メトロ 丸ノ内線 / 南北線)徒歩5分,「春日駅」(都営地下鉄 三田線 / 大江戸線)徒歩6分
定 員:20グループ(1~3名のグループでご参加ください,定員になり次第締め切ります)
参加費(税込):
当学会及び協賛学会の正会員(個人)/13,000円,会員外(一般)/19,500円
当学会及び協賛学会の学生会員(個人)/4,500円,会員外(学生)/6,500円
当学会賛助会員 招待券ご利用/無料,優待券ご利用/4,500円,左記サービス券なし/19,500円
特別優待券使用の場合:学生(RSJ会員非会員問わず)/無料,学生以外/4,500円
実習キット購入費(税込):マニピュレータ(電源セット)購入/85,000円 or マニピュレータ持込/10,000円
本セミナーは実習キットを使用しながら進めるため,グループごとに最低1セット必要となります.指定マニピュレータ(RT社製CRANE+(RT-CRANEplus))をご持参いただける場合(注意:CRANE+は電源も必要です.12Vおよび5Aが可能な電源をあわせて持参ください)は,その他のキットについてのみご購入いただきます.セミナー終了後,実習キットはお持ち帰り頂けます.
- 賛助会員招待券/優待券および特別優待券の詳細はご案内ページをご確認ください.
注意事項:
Ubuntu(16.04)とROS(Kinetic Kame)がインストールされたPCをご持参ください.ROSのインストール手順については,日本ロボット学会のWEBサイト(https://www.rsj.or.jp/seminar)より「トップページMENU>ロボット工学セミナー」をご確認ください.なお,本セミナーはC++言語の基本的なプログラミングスキルを習得している方を対象としています.
口 上
近年,サービスロボットを対象とした非産業用途におけるマニピュレーションに関する応用研究が注目を集めています.
2019年度の「ロボットの作り方セミナー」では,学生・研究者・技術者などを対象に,2 日間の講義や実習を通じてロボットアームを制御するための基礎知識や実用技術を学んでいただきます.
実習では,ロボット制御用ミドルウェアである ROS を用い,把持対象物を認識するための画像処理とロボットアームの制御処理を実装する方法を解説します.そして,受講される方には,実際の小型ロボットアーム制御システムを構築していただき,マニピュレーション研究,応用における知見の獲得を目指します.
オーガナイザー:長谷川 孔明(豊橋技術科学大学),高橋 三郎(パナソニック アドバンストテクノロジー)
日 程
1日目(11/16)
- 10:00-11:00 講義1 「ROS概論」
講師:Geoffrey BIGGS (TierIV) - 11:00-11:30 Linuxの基本操作
- 11:30-12:00 講習環境の整備とマニピュレータの動作確認
- 12:00-13:00 昼休み
- 13:00-14:00 講義2 「MoveIt構造とアプリケーション事例」
講師:Felix von Drigalski (OMRON SINIC X) - 14:00-15:00 ROSの基本操作
- 15:00-17:30 マニピュレータ制御
2日目(11/17)
- 10:00-10:15 カメラの動作確認
- 10:15-12:00 画像処理
- 12:00-13:00 昼休み
- 13:00-13:30 ROSの便利機能
- 13:30-16:30 画像処理とマニピュレーションの組み合わせ
- 16:30-17:00 課題と質疑
※ スケジュールは、演習の進行に応じて多少変更する場合があります。
本セミナーの到達目標は,参加者が画像処理とマニピュレータ制御のROSパッケージを利用し,作成できるようになることです.1日目はLinuxとROSの基本について学び,ROSでマニピュレータを制御するための方法を確認します(図1).2日目はROSで画像処理を行うための方法を学んだ後に,マニピュレータが画像処理の結果に基づいて自律的に動作できるシステムを構築します.講義では,実習に役立つ基礎理論や応用事例についての理解を深めます.
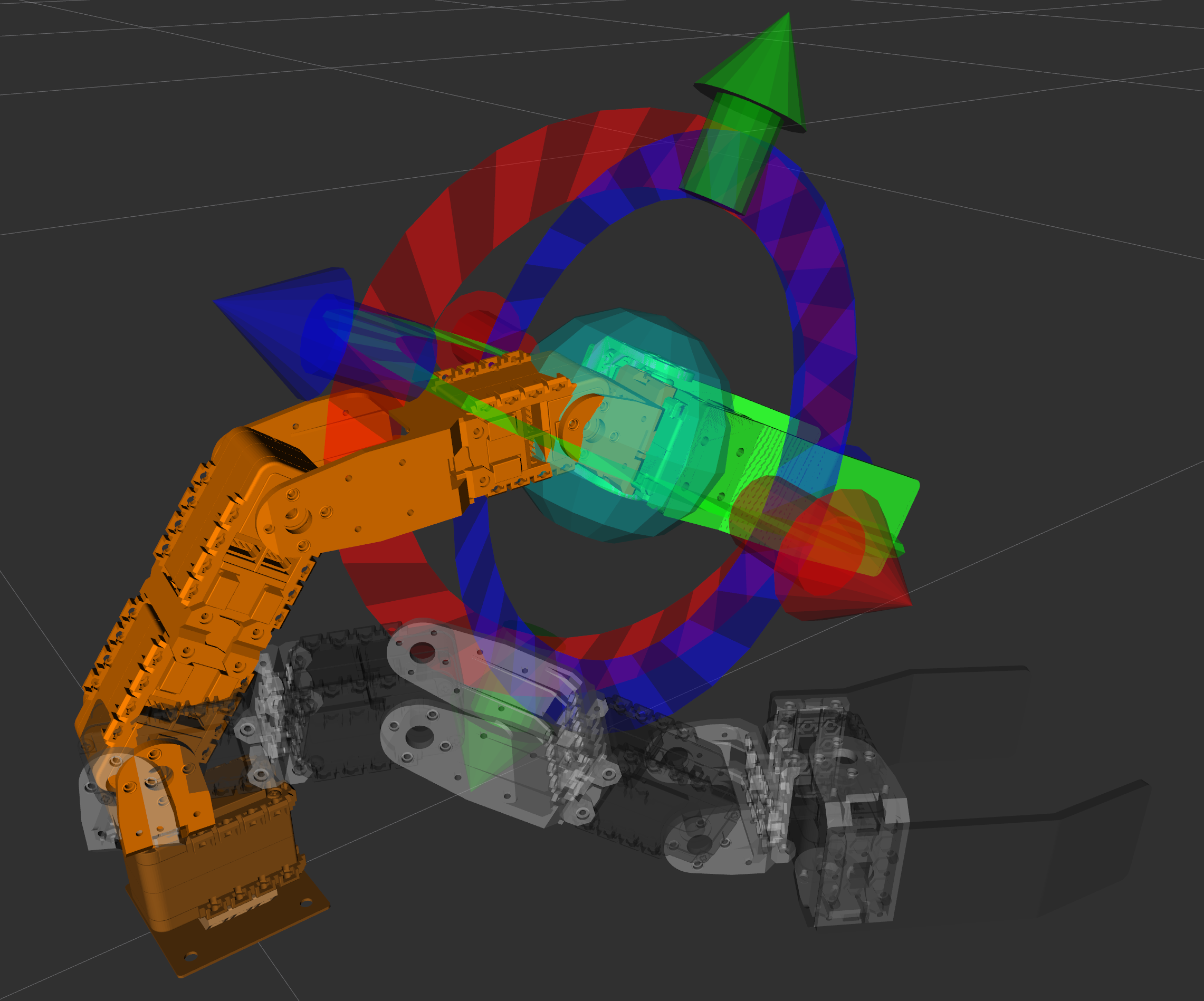 |
| 【図1:実習イメージ】シミュレーション環境内にマニピュレータのモデルを作成し,ユーザー操作により制御するイメージ |
実習キット:
本セミナーでは市販品(マニピュレータ,カメラ,三脚,スポンジなど)を組み合わせて実習用システムを構築します(図2).なお,マニピュレータとしてはRT社製のCRANE+(RT-CRANEplus)を使用します.
 |
| 【図2:実習キットイメージ】三脚に固定したカメラでスポンジの位置・姿勢を認識し,マニピュレータのハンドで把持を行う演習 |
セミナー参加申込
定員となりましたので参加申込み締切りました
セミナー参加に関する注意事項
- 会場,講師,日時等は都合により変更になる可能性がございますのでご了承下さい.最新の情報は学会ロボット工学セミナーHPに掲載されます.
- 台風等警報発令時のセミナー開催中止判断については「災害時における中止判断」のページをご確認ください.
- 当日、参加者の理解を深めるためテキストを配布致します。このテキストは、原則、講演に使用されるスライド資料等を縮小コピーしたものですが、諸事情により修正・抜粋がされている場合がございます。ご了承ください。また、テキストの後日販売は行いません。
- 参加者のセミナー会場内での撮影・録音行為は禁止させて頂きます。なお、撮影・録音を含む取材をご希望の場合は必ず事前に学会事務局までお問い合わせください。
主 催:
一般社団法人 日本ロボット学会
協 賛(予定):
計測自動制御学会,産業技術連携推進会議 医療福祉技術分科会,システム制御情報学会,情報処理学会,人工知能学会,精密工学会,電気学会,電子情報通信学会,土木学会,日本感性工学会,日本機械学会,日本シミュレーション学会,日本神経回路学会,日本設計工学会,日本時計学会,日本人間工学会,日本バーチャルリアリティ学会,日本ロボット工業会,農業食料工学会,バイオメカニズム学会